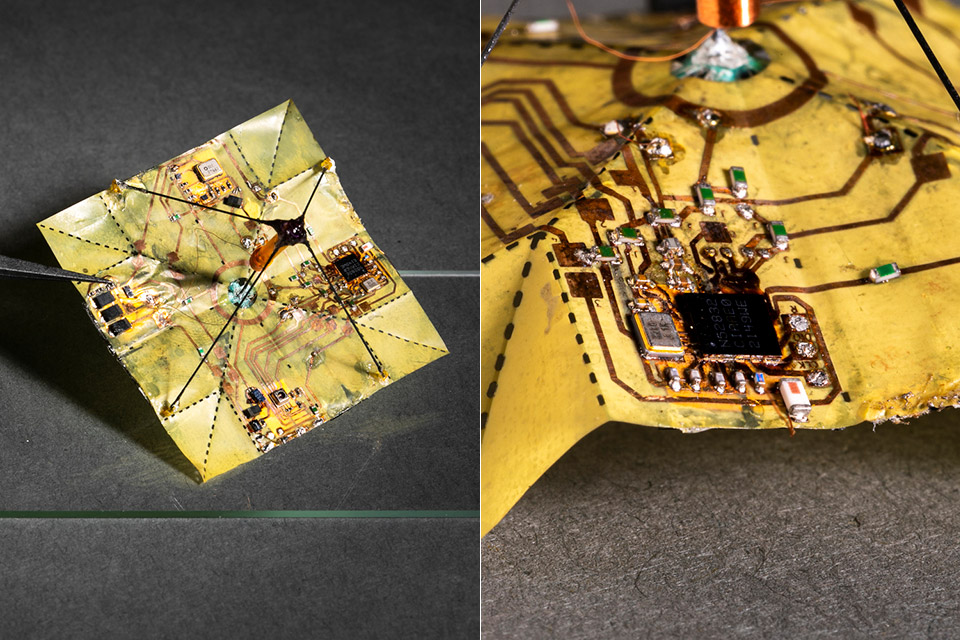
Yumuşak robotik alanında çığır açan bir yenilik olarak, Güney Kaliforniya Üniversitesi’nden (USC) araştırmacılar, origami sanatından esinlenerek geliştirdikleri yeni bir sensör tasarımıyla karşımızda. Bu sensörler, robotların esnek bileşenlerinin hareketini ölçmek için 3D elektrotlar kullanıyor ve tipik bir sensörden üç kat daha yüksek bir gerilim aralığı ölçebiliyor.
USC Viterbi Mühendislik Okulu’nda yürütülen bu çalışma, Hangbo Zhao liderliğindeki bir ekip tarafından gerçekleştirildi. Zhao ve ekibi, robotların esneklik ve iyileşme kabiliyetlerini, yani robotun hareketini tahmin etmek ve kontrol etmek için kritik metrikleri, kameralar yerine 3D elektrotlar kullanarak ölçmeyi başardı. Bu süreç, robotlar dünyada gezinirken, uzayda çalışırken veya insan vücudu içindeyken, birden fazla kamera ile çevrili olamayacağı için laboratuvar dışında iyi işlemiyor.
Zhao ve ekibinin önceki çalışmalarından yararlanarak, küçük ölçekli 3D yapıların tasarımı ve üretimi konusunda origami prensiplerini uyguladılar. Bu yöntemler, robotun şeklinin değişmesine izin verirken, malzemenin kendisinin dönüşümünü engelliyor. Bu elektrotlar açıldıkça, elektrik alanının gücünü yakalıyorlar. Ekip daha sonra, bu elektrik alanı okumasını deformasyon ölçümüne dönüştüren bir model geliştirdi.

Bu sensörler, protez bacaklarda bulunan mekanik tendonlardan insan iç organlarına kadar hareket halindeki yumuşak cisimlere takılabilir. Bu yüksek performanslı sensörlerin tasarımı, maksimum hassasiyetle hızlı bir şekilde yüksek deformasyonu ölçebilme kapasitesine sahip. Sensörler ayrıca, ekip tarafından yerel olarak deformasyonu ölçmek için sadece birkaç milimetre karelik bir algılama alanına sahip.



Bir Yorum